Tiny robots flex their muscles
By Eric Smalley, Technology Research NewsResearchers have produced tiny robot arms that work in salt water, a feat that makes the notion of swarms of microscopic robots performing medical procedures inside your body a little less fanciful.
The arms, developed by a team of researchers at the University of Linköpings in Sweden, are cousins of assembly line robots but with two important differences: they are very small, measuring 640 microns long -- or about two-thirds of a millimeter -- and they operate in liquids.
"Our principal application [will be] manipulation of biological entities like single cells, bacteria, and multicellular organisms in a lab-on-a-chip," said Edwin W. H. Jager, a graduate student and lead researcher on the project.
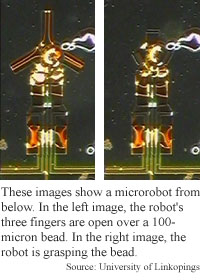
The researchers have gotten the microrobots to pick up and move a glass bead 100 microns in diameter. Human egg cells are 100 microns, red blood cells eight microns and the E. Coli bacteria one micron in diameter.
"It is very exciting work," said Richard Yeh, a graduate student researcher at the Berkeley Sensor and Actuator Center at the University of California, Berkeley. "As far as I know, the microrobot is the first one to manipulate sub-millimeter-sized objects in an aqueous solution."
Given more precise equipment, the researchers' technique could be used to make microrobots one-tenth the size of the current version, Jager said. And in principle they could be made even smaller, he said.
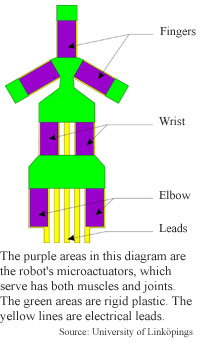
Each microrobot consists of an elbow, wrist and two to four fingers, all made of microactuators. Microactuators are tiny strips of material that bend when a small electric current is applied to them. The microrobots' microactuators consist of a layer of polypyrrole, which is a conductive polymer, and a layer of gold. The polypyrrole shrinks when the current is applied. Because the gold does not shrink, the microactuators bend. The microrobots are designed so this electrochemical reaction occurs when they are immersed in salt water or other electrolytic solution.
The researchers made the robots by first outlining their shapes on a titanium-coated silicon wafer via the photolithography process used to make integrated circuits. Then they layered gold over the titanium. Next, they put a rigid plastic between the actuators. They then deposited a layer of polypyrrole on top of the gold to form the actuators. Last, they dissolved the titanium layer, freeing the microrobot.
The microrobots could be used as minimally invasive surgical tools, said Yeh. They could also be used as miniature assembly line robots for building other microdevices, Jager said. The microrobots could be ready for commercial use in five to 10 years, he said.
The devices and their construction are described in a paper written by Jager, Olle Inganäs and Ingemar Lundström in the June 30 issue of the journal Science. The research was funded by the Swedish Research Council for Engineering Sciences and the Swedish Foundation for Strategic Research.
Timeline: >5
Funding: Government
TRN Categories: Robotics; MicroElectroMechanical Systems (MEMS)
Story Type: News
Related Elements: Photo; Diagram; Technical paper "Microrobots for Micrometer-Size Objects in Aqueous Media: Potential Tools for Single-Cell Manipulation" in the June 30 Science
Advertisements:
July 26, 2000
Page One
Tiny robots flex their muscles
Optical coax takes take turns
Making a caged ion blink
Simulation acts 7-year-old's age
Computer science faces decision theory
News:
Research News Roundup
Research Watch blog
Features:
View from the High Ground Q&A
How It Works
RSS Feeds:
News
Ad links:
Buy an ad link
| Advertisements:
|
 |
Ad links: Clear History
Buy an ad link
|
TRN
Newswire and Headline Feeds for Web sites
|
© Copyright Technology Research News, LLC 2000-2006. All rights reserved.