Shaky tabletop sorts parts
By Kimberly Patch, Technology Research NewsIf you're willing to wait half a minute, Dan Reznik's vibrating table will pass you a glass of champagne all by itself.
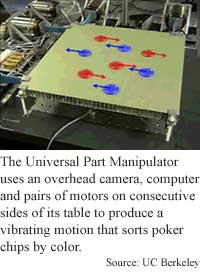
The Universal Part Manipulator is a table outfitted with flexible legs and four motors that gently vibrate to move objects around the surface. An overhead camera allows a computer to keep track of what's on the table and coordinate movements. The part manipulator's most complicated task to date is sorting poker chips by color.
The inspiration for this device was a computer's 'clean up desktop' button, said Dan Reznik, a postdoctoral student at Berkeley.
"With Windows... if you have folders scattered all over the place you can hit a button... and all the folders go neatly to grid points and get neatly rearranged. What if you could build a device that [automatically rearranges] objects in the physical world?" Reznik said.
The table has pairs of motors attached to two consecutive sides. This configuration allows it to move in three types of ways within the plane of the table: font to back using the motors on one side of the table, side to side using the motors on the consecutive side, and rotating when motors on the same side of the table move in opposite directions. "The motion is always horizontal, there's no up and down motion," said Reznik.
Reznik likens the vibrating motion to a foot massage machine. "If you put your hand on the table you can feel... a very low amplitude vibration," he said.
The table is made of an aluminum honeycomb material used for airplane floors because it is light and sturdy. "You want [it] to be light because there's a motor that is pushing the table around -- the lighter the table the smaller your motor can be," Reznik said
The researchers developed motion primitives, or algorithms to control the motors. The basic movement moves objects forward one centimeter per second. "It executes a vibration in one direction very quickly and then comes back in the opposite direction a little slower," allowing the object to slip forward slightly, said Reznik. If the vibration is fast enough, the objects appear to be moving forward continuously.
Currently, the table shuffles objects around fairly slowly. If it is moving one object at a time, the object will move one centimeter per second. If the table is actively moving more than one object to different places on the table, each object will travel a fraction of that centimeter per second. For instance, if the table is trying to move three different poker chips to different places on the table, each chip will move at one-third of a centimeter per second.
The slowdown happens for the same reason it takes a juggler more time to go through a juggling cycle as the number of juggled objects grows, said Reznik. "It would take a longer time for the juggler to cycle back to bottle No. 1 -- the same thing here. It is a kind of juggling motion... and as you add more objects the table spends more time juggling all the objects at the same time," said Reznik.
The table can move several objects at full speed if it groups them, however, and it can move one object at full speed while keeping others in place.
There was both a trick and a hard part to the project, said Reznik. The trick was realizing that it was possible to move one object on a plane while keeping others in the same place.
The motion primitive that accomplishes this applies a motion waveform to the table centered on the object to be moved. This vibration causes all objects on the table to move, but at the end of each millisecond long movement only the one object will inch forward, while the others will end up back where they began.
The difficult part of the project was integrating several technologies, said Reznik, pointing out that computer science, mechanical design and electronic design were all involved.
The work is impressive, said Matt Mason, professor of computer science and robotics at Carnegie Mellon University. "There have been a number of robotics researchers working on what we call nonprehensile manipulation or graspless manipulation... Reznik's work takes this idea to a very elegant extreme by moving several objects at once, giving each object an independent motion. His work combines an elegant use of planar kinematics with a creatively engineered use of friction to provide the motive power."
The work neatly sidesteps the difficult robotics problem of designing a general-purpose grasping hand, Mason said. "The hand is just a flat table, which fits all parts," he said.
There are issues still to be addressed, he added. For instance, the universal part manipulator can't handle round objects, and is fairly slow. "It might make sense to think about having more than one plate ... [or] to consider other ways of exciting the plates, or using shapes other than flat plates," said Mason.
Reznik is currently working on speeding the movement of objects on the table by about three times and allowing it to handle a wider variety of objects like pliers, computer chips, CD cases, books, and wine bottles. "We're manipulating full wine bottles right now. [They're] more unstable objects to manipulate then a glass because the bottle itself is taller," Reznik said.
Eventually, he plans to produce specific demos of more interactive tables like a desk that straightens itself, or a kitchen table that knows where the salt shaker belongs. "I would either be competing with the table to move [objects] to a specific spot or be aided by the table," said Reznik.
Other future possibilities include a warehouse with a smart floor that organizes boxes, or an entertainment application that moves people around.
The table project should produce something practical within two years, said Reznik. "I think a couple years is a good horizon for something commercial to pop out of this research," he said.
Reznik is continuing to work on the vibrating table as postdoctoral student at Berkeley, but is also employed by Siemens.
Reznik's research colleague is John Canny of Berkeley. They have submitted a technical paper titled "C'mon Part, Do the Local Motion," to the IEEE Conference on Robotics and Automation scheduled for Seoul in May, 2001. The research was funded by the National Science Foundation (NSF).
Timeline: 2 years
Funding: Government
TRN Categories: Applied Computing
Story Type: News
Related Elements: Photo 1, Photo 2; Technical paper "C'mon Part, Do the Local Motion," submitted to the IEEE Conference on Robotics and Automation scheduled for Seoul in May, 2001; Technical paper "Building a Universal Part Manipulator," IEEE Conference on Robotics and Automation in May, 1999 in Detroit; Reznik's demos www.cs.berkeley.edu/~dreznik/UPM2000/experiments.htm
Advertisements:
October 25/November 1, 2000
Page One
Disk-on-a-chip takes shape
Shaky table top sorts parts
Forked nanotubes are tiny transistors
Society goes on data binge
Pulse harbors magnetic mystery
News:
Research News Roundup
Research Watch blog
Features:
View from the High Ground Q&A
How It Works
RSS Feeds:
News
Ad links:
Buy an ad link
| Advertisements:
|
 |
Ad links: Clear History
Buy an ad link
|
TRN
Newswire and Headline Feeds for Web sites
|
© Copyright Technology Research News, LLC 2000-2006. All rights reserved.